
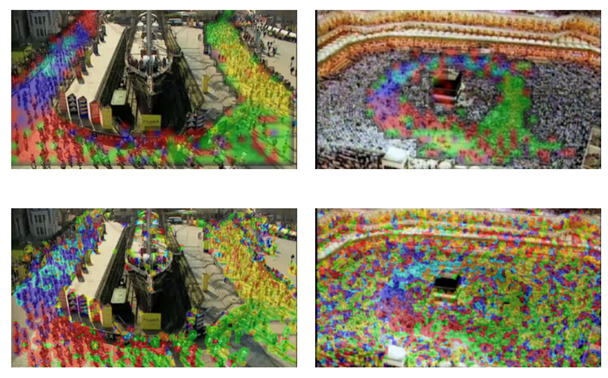
Crowd motion detected by our invention (top) versus competing algorithm (bottom)
Invention Summary:
Crowds can often be difficult to monitor in real time due to limitations of current algorithms and processing power. Drones provide a bird’s eye view of crowds but lack the on-board processing power to provide real-time feedback.
Rutgers researchers have created a novel, fast, and lightweight approach that makes conscious use of the onboard resources available in an Unmanned Aerial Vehicle (UAV) for the detection and identification of dominant crowd motion patterns in real time, taking only a few milliseconds to run on small, embedded modules. By piggybacking off standard video compression algorithms, we are able to skip expensive post-processing of the video feed and produce a 45x speed-up in execution time. It also includes a temporally aware approach to pinpoint and adapt to crowd movement patterns, continuously recalibrating as a drone’s Point of View (POV) varies or observed motions diverge.
Market Applications:
- Transportation Safety
- Intelligent Crowd Flow Management
- Defense
Advantages:
- Around 45x execution time reduction compared to existing approaches
- Approach is also temporally aware (adapts to changes in drone POV)
- Runs locally on UAV
Publications:
- K. Anjum, T. Chowdhury, S. Mandava, B. Piccoli and D. Pompili, "Leveraging On-Board UAV Motion Estimation for Lightweight Macroscopic Crowd Identification," in 2024 IEEE International Conference on Pervasive Computing and Communications (PerCom), Biarritz, France, 2024, pp. 11-17, doi: 10.1109/PerCom59722.2024.10494446. https://ieeexplore.ieee.org/document/10494446
Intellectual Property & Development Status: Provisional application filed. Patent pending. Available for licensing and/or research collaboration. For any business development and other collaborative partnerships, contact: marketingbd@research.rutgers.edu
