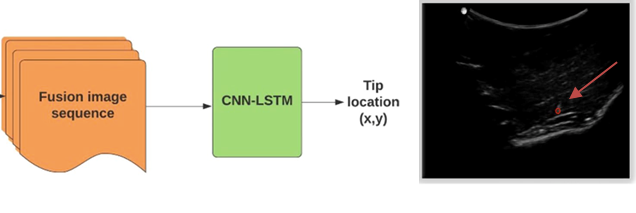
Block diagram of the framework for needle tip localization. The input to the neural network consists of a fused image sequence derived from enhanced tip images and their corresponding B-mode images. The red arrow points to the final tip location.
Invention Summary:
Ultrasound imaging is commonly used to guide the placement of needles for tissue biopsies, catheter insertions, drainages, and anesthesia. However, visual artifacts and/or low visibility make the needle location difficult in cases of steep insertion angles (40°-80°) and depths. Hence, there is a need for a method for an accurate real-time needle detection.
Researchers at Rutgers developed a novel machine learning-based image enhancement method for improved real-time localization of needles from ultrasound data, even when the needle shaft is invisible, and the tip has a low intensity. It takes enhanced sequence of needle tip images and uses spatiotemporal information to detect the needle tip. This technology outperforms all commercially available needle enhancement platforms by ~ 30% and has a processing time of only 0.064 seconds.
This software is cohesive with current 2D and 3D cart-based and hand-held ultrasound systems for facilitated integration.
Market Applications: Ultrasound-guided procedures requiring accurate needle visualization and localization like:
- Percutaneous biopsies
- Central venous cannulation
- Regional anesthesia
- Ablation
- Brachytherapy
- Fetal medicine
Advantages:
- Locates moving surgical tools at steep insertion angles and depths
- Applicable in both in-plane and out of plane imaging
- High tip localization accuracy (<1mm)
- Cost-effective
- Real-time (15fps) processing speed
- Applicable to other digital imaging techniques.
Intellectual Property & Development Status: Patent pending. Available for licensing and/or collaboration.
Publication: Hacihaliloglu I., Time-aware deep neural networks for needle tip localization in 2D ultrasound. Int J CARS (2021)
