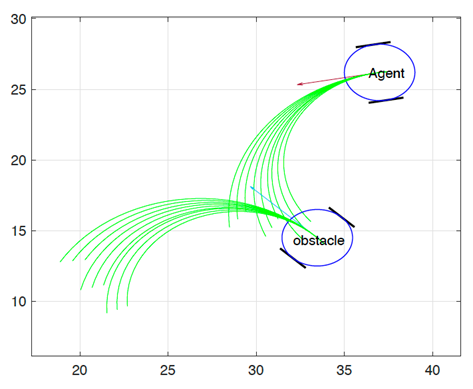
Image depicts admissible velocity identification of the agent through sampling-based mobility characterization of the moving obstacle
Invention Summary:
Within Dynamic window approach (DWA) systems, the agent lacks a mechanism that actively avoids collision when all its projected velocities are deemed inadmissible. While this passive approach ensures that the chosen velocities are collision-free, it may result in the agent coming to a complete stop if no admissible velocities are available, causing rear-end collisions. .
Rutgers researchers have developed an algorithm that introduces an active mechanism based on the mobility of moving obstacles within each control to avoid collisions. This method assesses the mobility of a moving obstacle by analyzing its translational acceleration and deceleration capabilities. Mobility of the obstacle within the upcoming control cycle is extended into a projected time, allowing for the identification of the admissible velocity of the agent at each control cycle. Collision-free results are demonstrated through two case studies including an open space navigation and a merging lane navigation through the comparisons with the DWA based on the trajectory prediction..
Market Applications:
- Autonomous wheelchair navigation
- Hands-free control for individuals with paralysis or quadriplegia
- Enhanced safety features for manual and powered wheelchairs
- Collision avoidance for moving robots in various industries
- Smart navigation for autonomous forklift trucks in warehouses and factories
Advantages:
- Reduced reliance on trajectory predictions
- Real-time adaptability
- Collision-free navigation
- Safety
Intellectual Property & Development Status: Patent pending. Available for licensing and/or research collaboration. Please contact marketingbd@research.rutgers.edu
Publications:
Xi, Z. (2022). COLLISION-FREE DYNAMIC WINDOW APPROACH FOR MOVING OBSTACLES. In 48th Design Automation Conference (DAC) Article V03AT03A037 (Proceedings of the ASME Design Engineering Technical Conference; Vol. 3-A). American Society of Mechanical Engineers (ASME). https://doi.org/10.1115/DETC2022-89613
